


科学剃刀
探索宇宙奥秘 · 理性思考
2024年,美国"毅力号"火星车在杰泽罗陨石坑边缘发现一条古老河流三角洲的遗迹。这项激动人心的发现背后,是一个尴尬的事实:为了到达那里,这辆价值27亿美元的火星车爬行了整整三年半。通信延迟、地形障碍和极度谨慎的地面操控,让地外探测始终快不起来。然而,2026年3月31日发表于《空间技术前沿》的一项研究,可能彻底改写这一局面。欧洲空间局与瑞士苏黎世联邦理工学院团队证实,配备科学载荷的腿式半自主机器人,可将行星表面探测效率提升数倍,同时不牺牲科学精度。
腿式机器人破解探测效率瓶颈
当前火星车任务面临物理极限。地球与火星通信存在4至22分钟延迟,科学家必须提前规划每一步操作。为确保安全,"好奇号"和"毅力号"通常每天仅行进几十米,活动范围被限制在着陆点周边极小区域。这种"一步一请示"的模式,虽然稳妥,却严重制约了科学产出。
瑞士巴塞尔大学团队在模拟火星环境的"Marslabor"实验室中,测试了名为"ANYmal"的四足机器人。这台机器携带机械臂,臂上集成两台关键仪器:显微镜成像仪(MICRO)和便携式拉曼光谱仪。实验设置极为务实:机器人需要自主接近多个目标,依次部署仪器,并传回图像与光谱数据。

图释:巴塞尔大学Marslabor中进行模拟测试的腿式机器人。图片来源:托马索·邦托尼亚利博士。
结果令人震撼。传统人工引导的单目标探测模式,完成一次分析需要41分钟。而采用半自主多目标策略,机器人连续探测多个地点仅需12至23分钟。速度提升两倍以上的同时,科学成功率并未打折。在一次测试运行中,所有选定目标均被正确识别。这意味着,未来任务可在相同时间内覆盖以往三倍的探测区域。
拉曼光谱与显微成像锁定目标
这台机器人的科学载荷看似轻巧,却足以完成天体生物学与资源勘探的核心任务。拉曼光谱仪通过激光与物质相互作用产生的散射光,识别矿物分子结构;显微镜成像仪则在可见光、紫外和红外波段拍摄岩石纹理,分辨地质特征。
在模拟月壤与火星风化层的测试中,系统成功识别出石膏、碳酸盐、玄武岩、纯橄榄岩和斜长岩等多种岩石。其中,纯橄榄岩富含橄榄石与金属氧化物,斜长岩含有钙长石,这些都是月球高价值资源的指示矿物。地球上罕见的钛氧化物金红石,也被机器人准确标记。对于寻找生命痕迹而言,碳酸盐岩层可能封存着古代生物活动的化学证据。
关键在于"快速普查"能力。机器人不再等待地球指令来挑选单块岩石,而是自主遍历区域,快速扫描大量样本,筛选出最具科学价值的地点供人类深入分析。这种"机器跑腿,人类决策"的分工,将彻底改变行星地质学的工作流程。
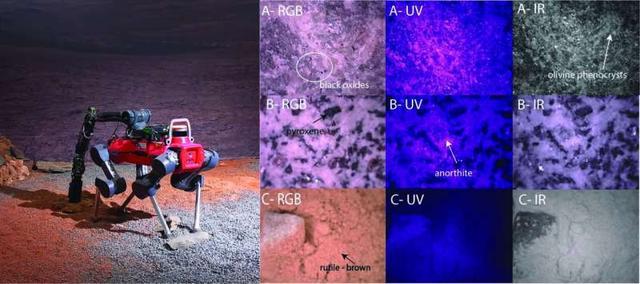
图释:左侧:机器人用MICRO和拉曼进行岩石自主测量。右侧:机器人返回的显微成像仪(MICRO)图像示例,展示了三种不同月球模拟材料的纹理,分别以RGB、紫外和红外效果呈现。图片来源:加布里埃拉·利格萨博士
行星探测范式面临历史转折
从地质尺度看,人类地外探测经历了三次范式转移。1960至1970年代,阿波罗计划依靠宇航员现场决策,机动性极高但成本巨大且风险极高。1990年代后,索杰纳号、勇气号、机遇号开启机器人时代,但受限于轮式结构与人工操控。2010年代的好奇号与毅力号,携带复杂实验室级仪器,却陷入"装备越重,行动越慢"的困境。
当前实验代表着第四次转折:从"重型精密仪器"转向"敏捷自主平台"。这并非要取代高端实验室,而是解决"找得到"与"够得着"的基础问题。毅力号每天分析一两块岩石,而新方案允许机器人在单次火星日(sol)内扫描数十个目标。这种效率跃升,对未来十年月球南极水冰勘探和火星生命迹象普查至关重要。
技术哲学也在改变。过去追求"一台仪器解决所有问题",如今转向"简单仪器+智能 mobility"。正如论文作者利盖扎博士指出,紧凑型设备配合自主系统,足以实现完整的科学目标。
中国加速布局地外智能探测
在这一领域,中国并非旁观者。从"玉兔号"月球车到"祝融号"火星车,中国已掌握行星表面巡视技术,但当前平台同样受限于地面控制模式与通信延迟。值得警惕的是,中国在腿式机器人与自主探测领域的研究正快速推进。

图释:测试台上安装有腿机器人操作,控制室和操作员在背景中。图片来源:托马索·邦托尼亚利博士。
哈尔滨工业大学、浙江大学等机构已开展四足机器人月面行走试验,重点解决低重力环境下的步态稳定问题。航天科技集团五院提出的后续月球探测方案中,明确将"高度自主资源勘查机器人"列为关键技术。针对月球南极永久阴影区水冰探测,以及未来火星采样返回任务,半自主腿式平台可弥补现有轮式巡视器机动性不足的短板。
更具战略意义的是资源维度。实验识别的纯橄榄岩与氧化物,正是月球原位资源利用(ISRU)的核心目标。随着中国探月工程四期启动与国际月球科研站规划,高效资源勘探技术直接关系到地外长期驻留的可行性。在火星生命探测方面,中国天问三号任务计划2030年前后实施采样返回,若结合自主快速筛选技术,将大幅提升发现生物标志物的概率。
当ANYmal在巴塞尔的模拟火星实验室中迈出下一步,它踩中的不仅是模拟风化层,更是人类深空探测的新起点。从蜗牛爬行到自主奔跑,地外探测正在摆脱带宽与延迟的桎梏。或许不久之后,当中国航天员或机器人抵达月球南极时,迎接它们的将是已经自主标记好的水冰矿脉,而非一片茫然的荒原。
参考文献
原始论文:https://phys.org/news/2026-03-legged-robot-resource-prospecting-moon.html
展博优配提示:文章来自网络,不代表本站观点。


